I am attempting to generate a plan file for the Halcyon machine’s Proximal MLC Picket Fence test using the Plan Generator. While I successfully created the plan, I encountered an error when exporting it back to the Eclipse TPS. The error message states: ‘Control point analysis sequence is static.’ I have attached both the plan file exported from Eclipse and the generated plan file. Could you please review and provide your input?
thank you

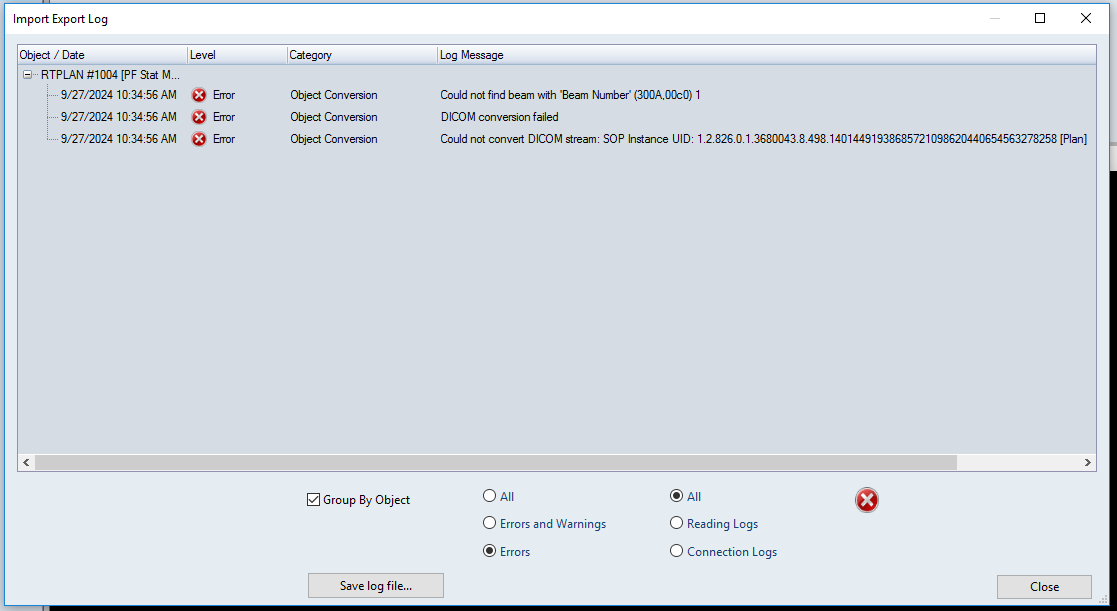
The first item is a warning and will not prevent import. I’m not seeing the attached DICOM files to inspect.
https://drive.google.com/drive/folders/1F9i5IoL5RyqPi6nR1wc52n_OwyZc5Od2?usp=sharing
Please download the DICOM files from the provided drive link.
The three errors are preventing the import of the plan in Eclipse V17. The plan named “Plan PF” was exported from Eclipse, while the other one is a generated plan.
please provide yourr input
Plan Generator Pylin - Google Drive 1
Please download the DICOM files from the provided drive link.
The three errors are preventing the import of the plan in Eclipse V17. The plan named “Plan PF” was exported from Eclipse, while the other one is a generated plan.
please provide yourr input